

SimAr Humanoid Robot

SimAr Humanoid Robot: A Semi-Intelligent Multifunctional Robot
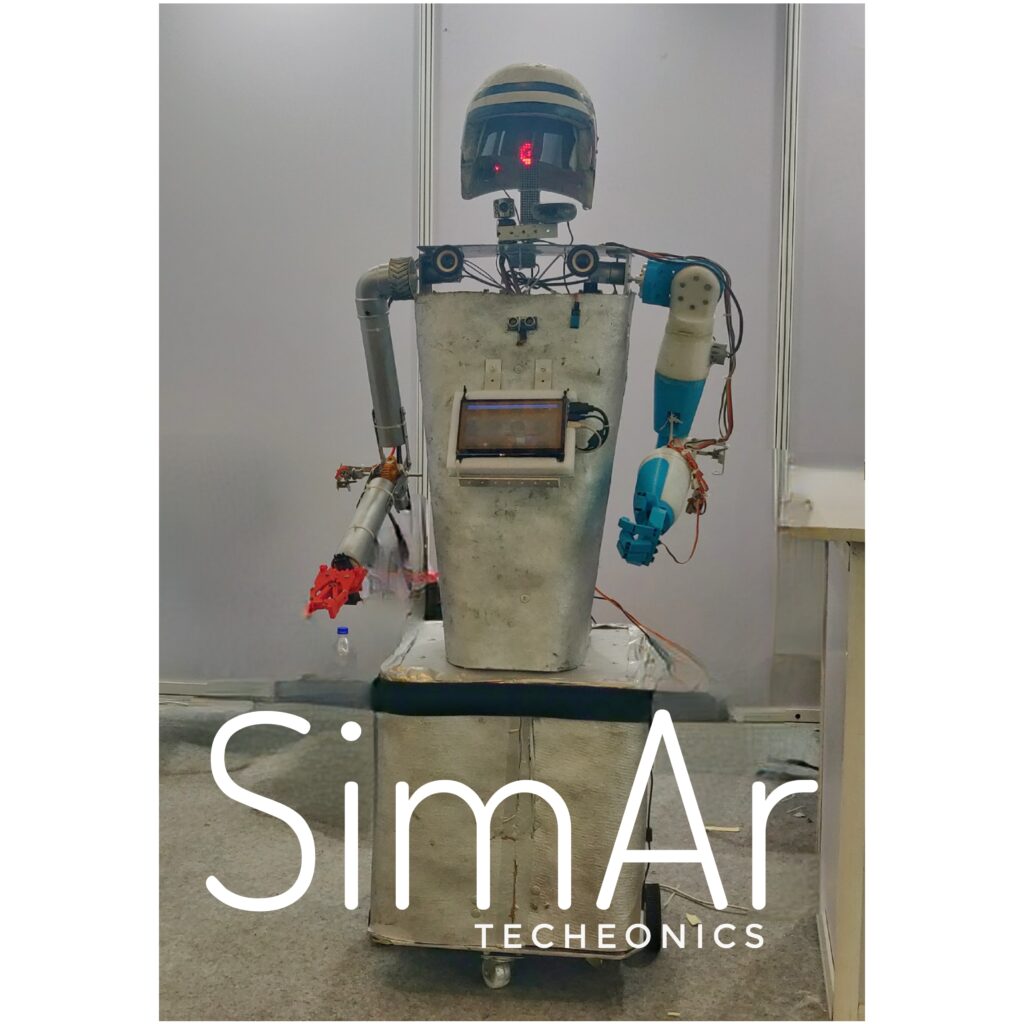
Back in 2019, we embarked on an exciting journey to develop the SimAr Humanoid Robot—an acronym for Semi-Intelligent Multifunctional Autonomous Robot. This project was built upon the foundation of multiple prototypes and research iterations, culminating in a sophisticated system that took us approximately two months to fully develop.
SimAr is designed to push the boundaries of humanoid robotics by integrating cutting-edge components, precise control systems, and advanced algorithms for semi-autonomous functionality. Standing at approximately 5 feet tall, this humanoid robot is capable of performing several advanced tasks, including human and object tracking, face and object recognition, voice command processing, and much more.
Robotic Hand Design and Mechanism
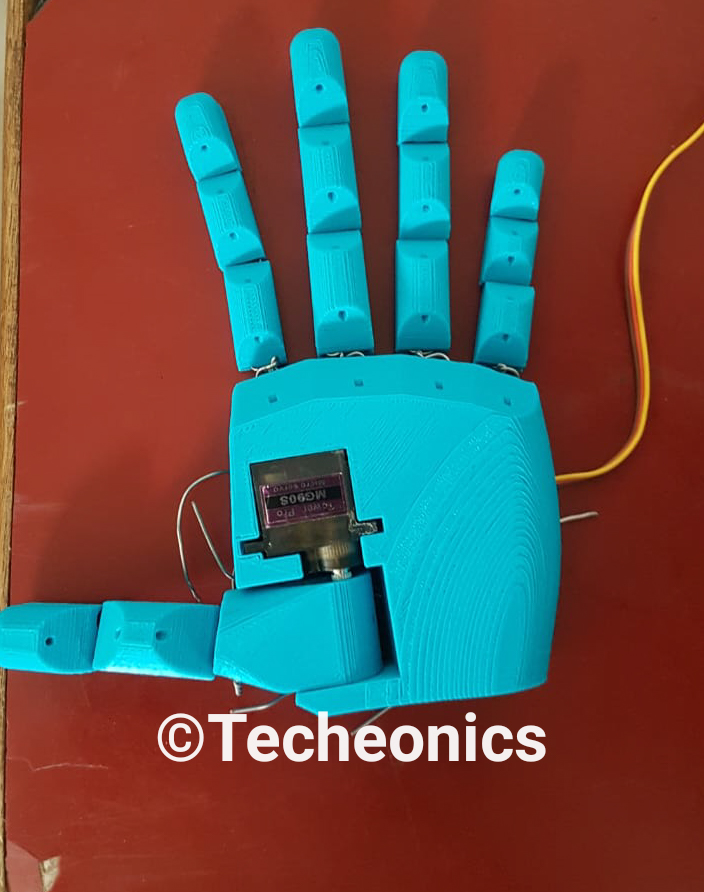
We initiated the project with the development of a 3D-printed robotic arm. Using a combination of pre-made designs and custom modifications, we created an arm capable of 7 degrees of freedom (DOF). This was made possible through the strategic placement of servos and the thoughtful design of its joints.
- Fingers: For finger movement, we used 4 metal-geared servo motors (MG 995). One servo controls the small and ring fingers together, optimizing motor usage and reducing complexity.
- Wrist: A fifth servo motor is installed in the forearm to facilitate wrist rotation.
- Challenges and Modifications: Initially, the arm was intended to have full 7-axis freedom, but due to the unavailability of certain specific motors, we modified the design. To accommodate this, we CNC-milled portions of the arm to fit alternative motors. A pulley system was implemented for elbow movement, along with a cost-effective solution that converted a DC motor into a servo for controlled elbow actuation.
The shoulder joint was designed with a custom motor hub, enabling smooth movement and integration with the motor, giving the arm a more human-like range of motion.

The Second Robotic Arm
Once the first arm was successfully developed, we moved on to the construction of a second arm, utilizing PVC pipes as the primary structure. This arm’s elbow joint was powered by a worm and pinion gear system connected to a DC motor, ensuring robust movement. The hand was equipped with a 3D-printed gripper controlled by two servos, offering flexibility in handling objects.
Robot Body and Mobility
With the arms completed, we turned our attention to the body. The design process began with sketches on paper, followed by precise construction of the base.
- Base: The base was crafted from plywood sheets cut to specified dimensions. We designed custom motor holders using U-shaped metal brackets, secured to the motors via drilled holes. The motors driving the base were 200 RPM side-shafted high-torque metal-geared motors, selected for their durability and performance. Four free wheels were added to the base for balance and smooth movement.
- Body Structure: The body was built from aluminum sheets reinforced with plywood, providing both strength and flexibility. The structure was divided into two sections:
- Base to Waist: Constructed using aluminum and plywood for rigidity.
- Waist to Neck: Designed to be lightweight yet strong, incorporating thin plywood and aluminum to achieve the desired shape. We also integrated a servo motor in the neck, allowing the head to move freely for improved interaction and perception.

To give the robot a finished appearance, the entire body was covered in cardboard and painted with a silver aerosol spray, resulting in a sleek, glossy finish.

Features and Functionalities
SimAr is not just a mechanical structure but a highly functional and interactive robot equipped with intelligent systems that enable it to perform several complex tasks:
- Human and Object Tracking: Using its dual-camera system, SimAr can follow both people and objects. One camera is dedicated to object tracking and detection, while the other provides an open vision feed to assist in human interaction and environmental awareness.
- Face and Object Recognition: SimAr is equipped with a face recognition system that allows it to identify and remember individuals. It can greet people whose data is stored in its system and even follow them around, making it suitable for interactive environments.
- Voice Recognition and Command Processing: The robot can recognize voice commands and provide appropriate responses. Whether it’s simple instructions or more complex queries, SimAr is capable of interacting with users in a dynamic manner.
- Touch Interface: A 7-inch touch display on the front allows users to interact with the robot directly. This screen is used for displaying information, visual output, and controlling SimAr’s various functions.
- Facial Expressions: SimAr also features an 8×8 matrix display that acts as its eyes. The display is capable of showing animated expressions, giving the robot a more human-like and interactive personality.
Electronics and Control Systems
The electronic system powering SimAr is a sophisticated combination of several controllers and components:
- 4 Arduino Uno boards for motor and servo control
- Raspberry Pi for high-level tasks such as image processing, facial tracking, and voice recognition
- L298N Motor Driver boards for motor control
- Boost converters for power regulation
- 7-inch touchscreen LCD for user interaction, connected to the Raspberry Pi
- Logitech and Intex cameras for computer vision
- 8×8 matrix display for visual output
- Amplifier and speakers for audio feedback
Software Development
Once the hardware assembly was completed, we moved on to software development. This involved writing several programs in Python and Embedded C for the Raspberry Pi and Arduino, respectively. The Raspberry Pi handled advanced tasks such as image processing, facial recognition, and voice commands using Python libraries, while the Arduino boards managed motor and servo actuation.
The entire programming phase took approximately 2-3 weeks. After extensive testing, we successfully verified the functionality of each system, and SimAr was ready for operation.
Conclusion
The SimAr Humanoid Robot stands as a testament to what can be achieved with a multidisciplinary approach involving mechanical engineering, electronics, and software development. With its 5-foot stature, dual-camera vision, face and object recognition, voice command processing, and interactive displays, SimAr can serve as a versatile platform for both research and practical applications.
This project has been a significant learning experience in robotic system integration, and we are excited about its future applications in various fields, including human-robot interaction, automation, and artificial intelligence.
If you’re interested in exploring the code and design files for SimAr, you can find our repository on GitHub
Watch our demo video:
SimAr Humanoid Robot – YouTube
Check out this news article. on LiveMint
